{{ post.title }} 글 편집 글 편집 (이전 에디터)
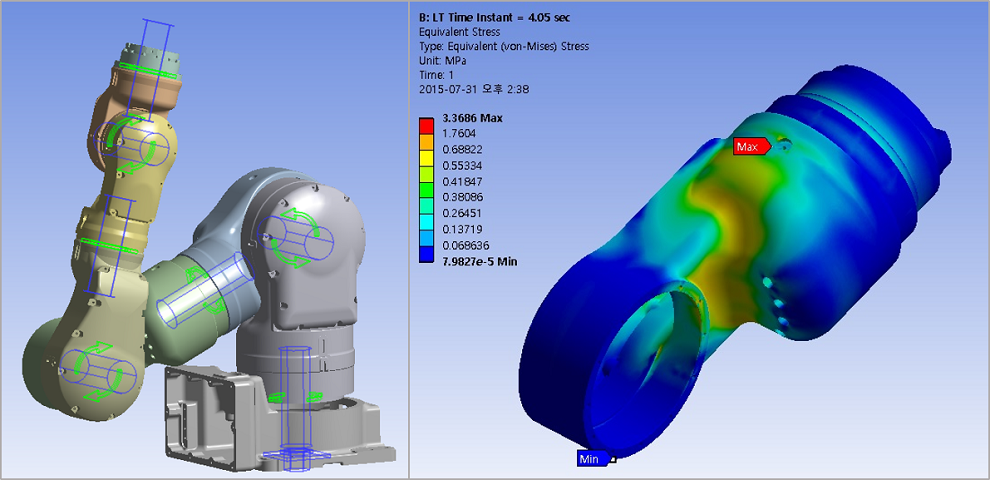
在机器人驱动的过程中,通过动力学仿真来计算作用于手臂的载荷,通过LoadTransfer结果仿真模型载荷条件变化情况,并进行强度分析。
根据机器人手臂的不同行为计算变化的动载荷,并将其用于结构仿真中。
Model Information
- Geometry : 8
- Body : 0
- Joint : 8
- Force : 0
- Contact : 0
- Expression : 9

在机器人驱动的过程中,通过动力学仿真来计算作用于手臂的载荷,通过LoadTransfer结果仿真模型载荷条件变化情况,并进行强度分析。
根据机器人手臂的不同行为计算变化的动载荷,并将其用于结构仿真中。
韩国 京畿道 城南市 盆唐区 板桥路 228 号 15 ,板 桥 Seven venture Valley 1 区 2 栋 5 层 (邮编: 13487)
Copyright © FunctionBay, Inc. 浙ICP备19050756号
