
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
在使用接触实体的模型的仿真结果中,出现了接触力显示为负的结果的情况。
接触力根据一般的计算方法应该给出正数的结果。但是如下图所示,可以得出负的结果,这与接触实体的Action Body(动作体)的Center Marker(中心标记)有关。
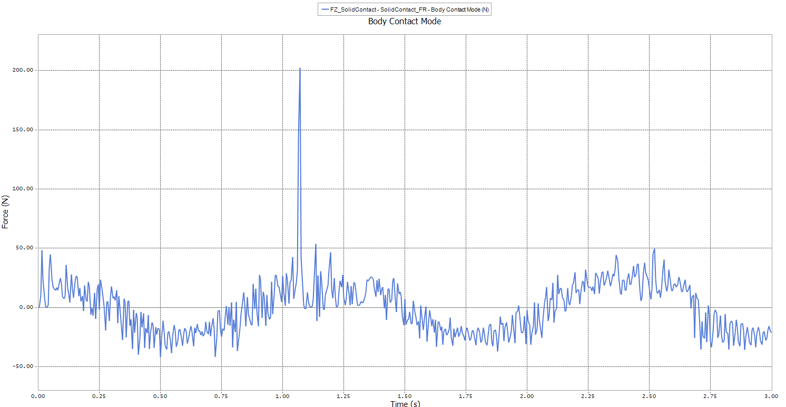
接触力是根据动作体的中心标记计算的。根据动作体的行为和中心标记的姿势,需要确认的方向上的接触力可能会计算为负数。
这种情况下,可以使用Scope功能以Global Inertial Marker为基准检查结果图并分析正数的接触力。
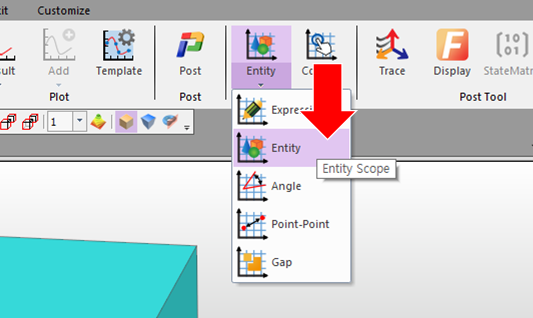
1. 选择Scope: Analysis选项卡> Scope组>选择Entity Scope图标
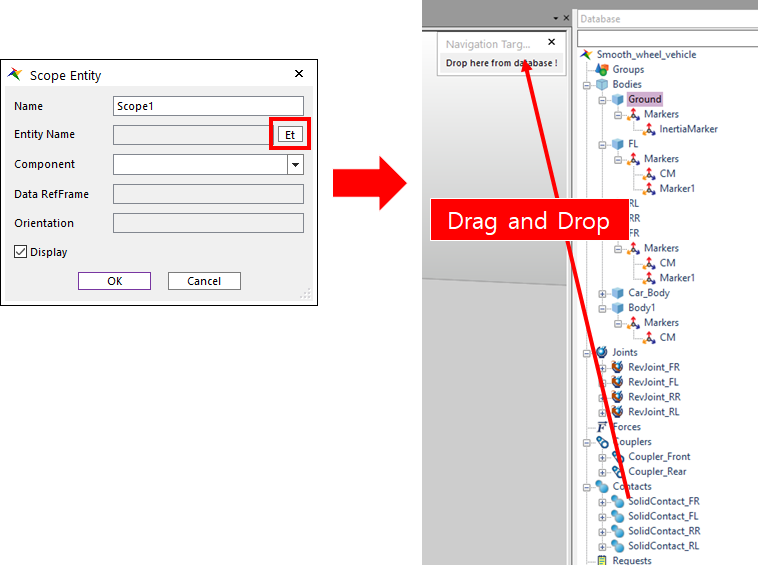
2. 选择Contact Entity: 点击[Et]按钮并将需要进行结果分析的Contact拖放到Drag & Drop
3. 在Component中选择要确认的结果项
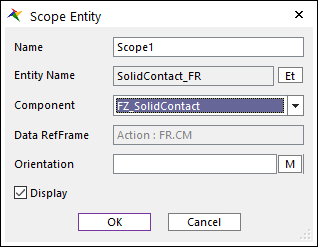
4. 选择要参考的Reference Marker(参考标记): 选定为Ground.InertiaMaker
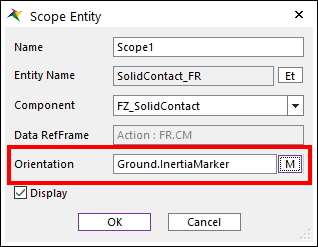
5. 查看Scope结果: 点击[OK]按钮确认图表。
请使用以上方法分析结果,或者尝试使用Geo Surface Contact和Geo系列接触实体。
