
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.tutorial.upload_filename }} | Attached File | {{ post.file.upload_filename }} |

ㆍ 研究产品 :象鼻机器人机械手臂
ㆍ 分析目标 :软体象鼻机器人机械手臂的优化设计
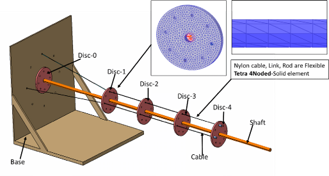
象鼻机器人是一种模仿象鼻行为的具有无限自由度的机械手臂,目前正在研发中。这种机器人是由一组圆 盘,通过中心连接到一个柔性轴上,由一组穿过圆盘的电缆控制。电缆的末端直接连接到电机上。手臂可连 续运动,可针对特定的应用场景进行定制,例如,探查危险区域。为了优化这种柔性机械臂的设计,需要研 究几个参数:电缆张力、电缆末端随时间变化的力、驱动机构所需的力、机器人的工作半径。
仿真过程
① 创建象鼻机器人,由圆盘、电缆、底座和柔性轴组成
② 使用用户定义的运动对安装在箱体底部的执行器和直流电机进行数字化建模
③ 研究末端执行器在工作区域内可以达到的运动范围
④ 计算并比较使用不同材料(尼龙、聚四氟乙烯)时电缆的强度
⑤ 计算电缆在运行过程中承受的负载
⑥ 计算操作过程中电缆与圆盘接触时的摩擦载荷
关键仿真技术
• 多体动力学,专用于多个组件的机械建模:圆盘、电缆、底座、轴和直流电机
• MFBD (FFlex)技术来表示电缆的大变形并预测其强度
• 考虑柔性电缆和刚性圆盘之间的接触(包括摩擦)

工具包
• RecurDyn/Professional
• RecurDyn/FFlex
工程问题
• 需要通过瞬态动力学分析来预测末端执行器的运动
• 需要考虑电缆的非线性大变形和摩擦接触
• 不同的电缆材料(如尼龙或聚四氟乙烯)会影响末端执行器的运动
• 需要事先确定机器人末端执行器的工作半径
解决方案
• 利用专业的多体动力学软件对多个部件组成的机械手进行建模和动力学仿真
• 多柔体动力学是计算大变形电缆运动行为的必要手段
• 通过高精度的可视化模型和定量评估机器人末端执行器的轨迹
• 考虑刚体和柔性体间摩擦的接触算法
结论
• MFBD模型准确复现象鼻机器人的动力学行为
• 通过MFBD优化模型,使其工作半径达到上限
• 精确计算电缆所承受的载荷
• 选择合适的电机和末端执行器
其他应用场景
ㆍ机器人手臂一部分被柔性化,因此可以看到手臂的振动
ㆍ多样的应用案例
ㆍ客户案例

