
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.tutorial.upload_filename }} | Attached File | {{ post.file.upload_filename }} |
使用MFBD的双杆拖拉机 开发ROPS虚拟试验方法
研究产品: 拖拉机翻转保护机构
仿真目的:使用MFBD模块实现倾翻保护机构(ROPS)的虚拟试验方法
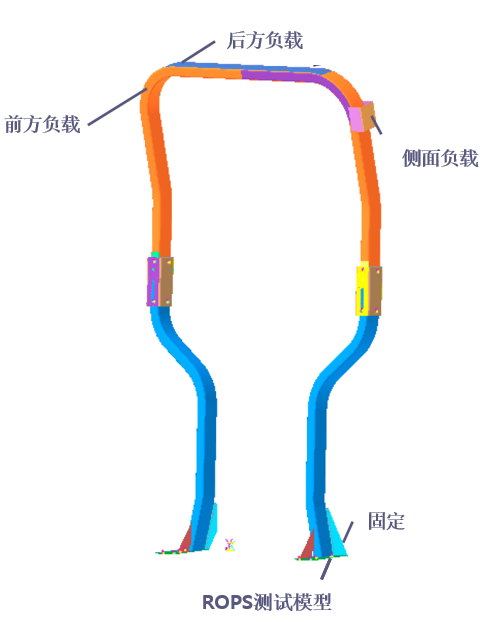
翻转保护机构(ROPS,Roll Over Protection Structure)安装在拖拉机车身上,是一种当重型设备倾翻时,可以将驾驶员受伤程度降到最小的机构。因此,ROPS在车辆颠倒时应能充分吸收与地面的冲击力,并为驾驶员提供安全空间。为了评价这种ROPS的安全性,国外一些国家的《农业机械化促进法》引用了经合组织CODE规定的试验程序。在本例中,使用RecurDyn的基于Implicit Solver的MFBD相关组件实现了ROPS试验方法,并评估了与静态非线性分析结果的误差以及收敛性。
◆ 仿真过程
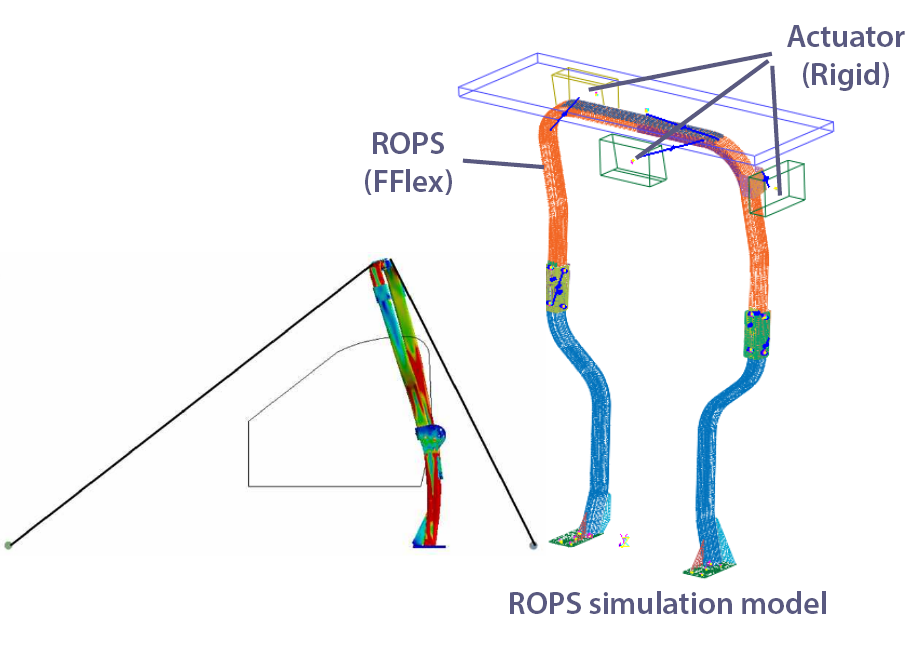
① 创建驾驶员安全区域、ROPS结构、液压推动器的动力学模型
② 为ROPS结构创建柔性体模型(细长几何,使用Shell建模)
- 使用Geo Surface Contact,在液压推动器(Rigid)和结构物(FFlex)接触时,将振动降到最小
- 在接触位置定义Contact,以避免结构变形导致穿透
- 考虑到Mid-surface类型的Shell Element特性,将焊缝建模为FDR(RBE2)元素
③ 启动连续位移负载试验程序,比较评估满足要求能量的位移上限
◆ 关键仿真技术
• 用于ROPS虚拟试验的MFBD(刚柔耦合)建模仿真技术
• 在Mid-surface类型的FE模型中,用于焊缝处理的FDR(RBE2)单元处理技术
• Scenario分析功能和Contact On/Off控制技术可实现连续位移负载

◆工具包
• RecurDyn/Professional
• RecurDyn/FFlex
◆ 工程问题
• 物理样机制造成本耗费大量的时间和费用
• 需要对多个设计变量进行主动安全评估
• 需要实施连续负荷控制方法以考虑残余应力
• 比静力学分析模型更简单的定义接触以及快速收敛
• 对仿真时间的要求
◆ 解决方案
• 使用RecurDyn的MFBD刚柔耦合模型代替物理试验所需的物理样机
• 通过从CAD几何的Mid-surface geometry创建Shell单元的柔性体模型,缩短仿真分析时间
• 考虑结构的大变形和材料非线性特性(塑性),使用非线性各向同性强化弹塑性
• 在每个负载阶段确认安全区域受到威胁时,为了在保持塑性变形的条件下进行连续分析,通过使用Scenario analysis的Contact On/OFF控制实现连续负载
◆ 结论
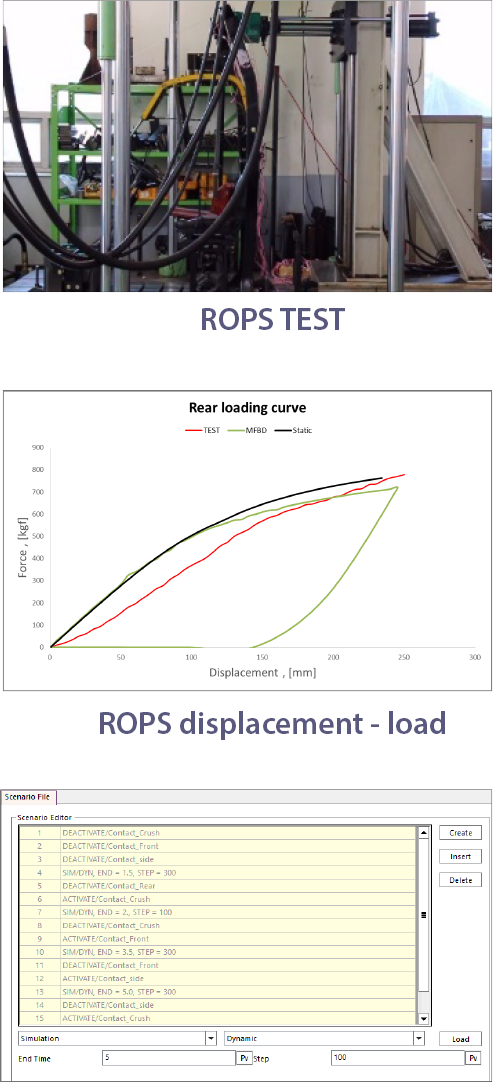
• 使用MFBD技术实现了基于Implicit solver的ROPS非线性分析
• 确定了与试验结果相似的位移误差上限
• 使用比静力学分析更简单的接触定义方法,获得了高精度的结果
• 采用Scenario analysis 功能的位移控制方法,实现了与试验环境相同的分析方法
◆ 其他应用场景
• 拖拉机的割草机分析

- 利用RecurDyn和粒子法分析带割草机(mid mower)的拖拉机的动力学行为

