
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.tutorial.upload_filename }} | Attached File | {{ post.file.upload_filename }} |
利用MassPin常平架驱动的小型设计(防务产业)
< 客户信息 >
• 客户名称 : LIG 넥스원
• 主要事业:精密电子武器开发与生产
• 公司位置:京畿道龙仁市旧城邑马北洞148-1研究7集团
<项目>
• 利用MassPin对系统中发生的质量不平衡的扭矩进行最小化设计
<使用的产品>
• RecurDyn/Professional
• RecurDyn/Linear
<使用的产品功能>
• Import
• Wireframe
• Creating Joint Entities
• Materials: Metal Plastic
• Solver Type : CF
• Analysis Type: Dynamic
<效果>
• 质量不平衡扭矩最多可减少70%左右
=======================================================================
安装在制导武器或机载雷达上的常平架驱动部,所有部件的可用空间都非常狭窄和有限,无法使用大容量的马达,也难以选择所需扭矩过大的零件。而且负载的天线装配体上面广泛分布着微波收发所需的主要部件,使得精确快速定位的加速运动变得十分困难。
在这种限制条件下,为了满足操作要求,重要的是要计算出所有产生动态运动的部件和装配体的精确的基础材料性质,并计算出质量不平衡引起的负荷,以满足所产生的摩擦效应和加速度条件。特别是在重力加速度大的情况下,这种质量不平衡导致的负荷对系统来说是致命的。
因此,通过对质量不平衡引起的负荷进行最小化设计,将电机的必要扭矩减小到最小,进行常平架驱动部的小型设计是可行的。为了利用Mass Pin进行质量不平衡扭矩最小化的设计,利用三维CAD软件计算了常平架和Mass Pin按零件或装配体的基本材料特性。利用多物体动力学仿真工具RecurDyn进行了MassPin的优化设计。
Case Study
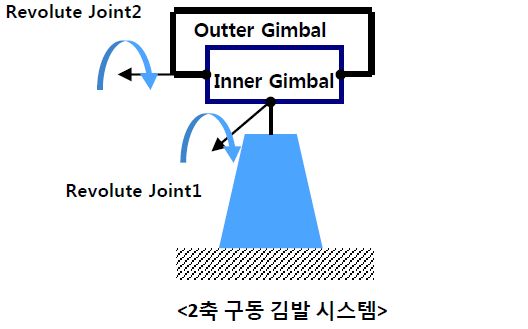
1) 双轴常平系统的结构
在一般的双轴常平系统的简图中,在外部常平架上配有陀螺,每个轴由传感器,马达和轴承组成。陀螺是一种惯性传感器,它可以稳定常平架的运动,通过在每个轴上安装位置传感器来控制天线的位置。
2) 动力学仿真建模
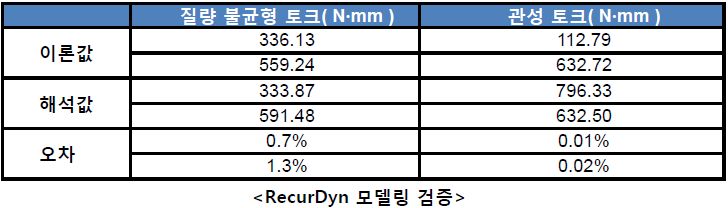
利用三维CAD软件I-DEAS进行了建模,并对各构成零件进行材料特性的计算,动力学仿真采用了多物体动力学仿真工具RecurDyn。由于是刚体仿真,为了缩短仿真时间,在I-DEAS中对每个组装体导入到Recurdyn。每个轴的旋转利用RevoluteJoint并假设没有摩擦。由于重力加速度可能发生在前向,利用RevoluteJoint对常平架进行了前向旋转,为了验证其在RecurDyn中的建模,对各轴上的质量不平衡扭矩和惯性扭矩进行了理论值的比较。

3) 利用Mass Pin进行重心转移
常平架因其平台特性受大重力加速度的影响. 当重力加速度较大时,小的重心的移动也会导致大的质量不平衡扭矩,这种质量不平衡扭矩会导致马达的大容量化,系统不稳定等致命缺陷。因此,在平台上使常平架驱动体的重心与转轴相匹配是最重要的设计要素。
因此,为了使重心与转轴相匹配,进行了Mass Pin的设计和仿真。即使仿真中的重心是与转轴相匹配的,但在实际机器制造和装配过程中,重心可能会发生移动,因此利用Mass Pin可以很容易地调整重心。
在仿真中,利用RecurDyn进行了孔位置和Mass Pin重量的优化设计,实际系统中发生的重心移动可以通过改变Mass Pin的重量,轻松地将重心与转轴相匹配。
4)
仿真&解析结果
»
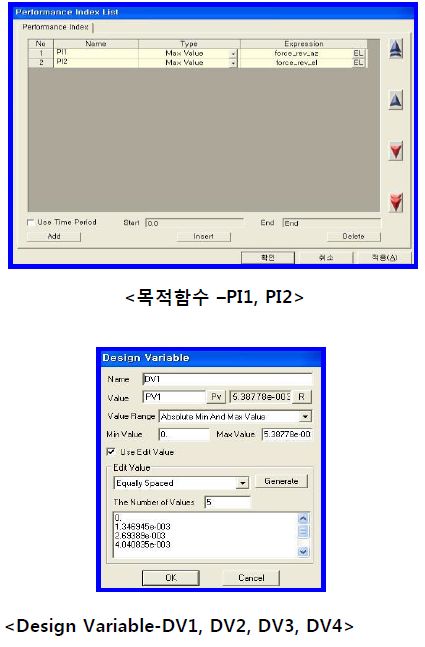
目标函数&Design Variable
使用了和Design Variable来对Mass Pin的位置和重量进行优化设计。
»
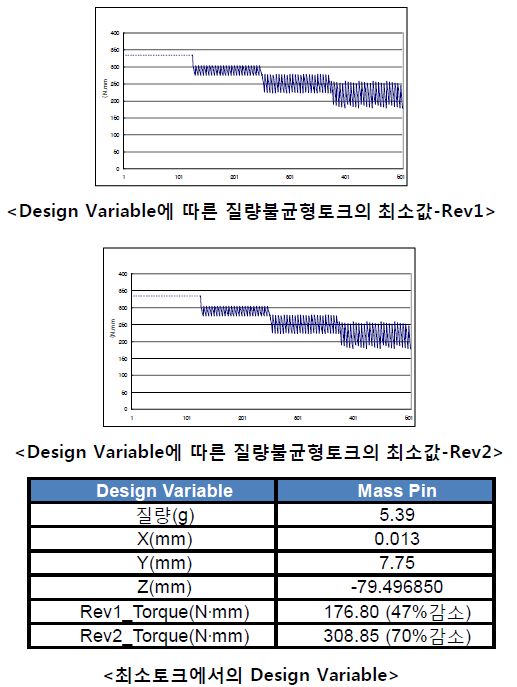
仿真结果
各轴质量不平衡扭矩的最小值分别为176.80和308.85左右,此时的Mass Pin的重量和位置(x,y,z轴)如下。
效果
利用RecurDyn进行了常平架驱动系统中质量不平衡扭矩最小化的Mass Pin的持续优化设计,结果表明:以质量不平衡扭矩最小化为目标函数,Mass Pin的质量和位置(x, y,z轴)被称为“Design Variable”,这使得常平架的质量不平衡扭矩减少了70%左右。
.

{kind=link}