
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
RecurDyn提供了与仿真相关的各种参数。
虽然大部分可以使用默认参数,但有时候需要对其进行修改。
在这里提供简单的说明,如需详细的说明,请参考手册。
使用黄色标记的是一些常用的参数。
对与基础的求解器参数相关内容,请参求下列文章。
- 求解器入门第1弹
- 求解器入门第2弹
- 求解器入门第3弹
- 了解仿真参数!第1弹
- 了解仿真参数!第2弹
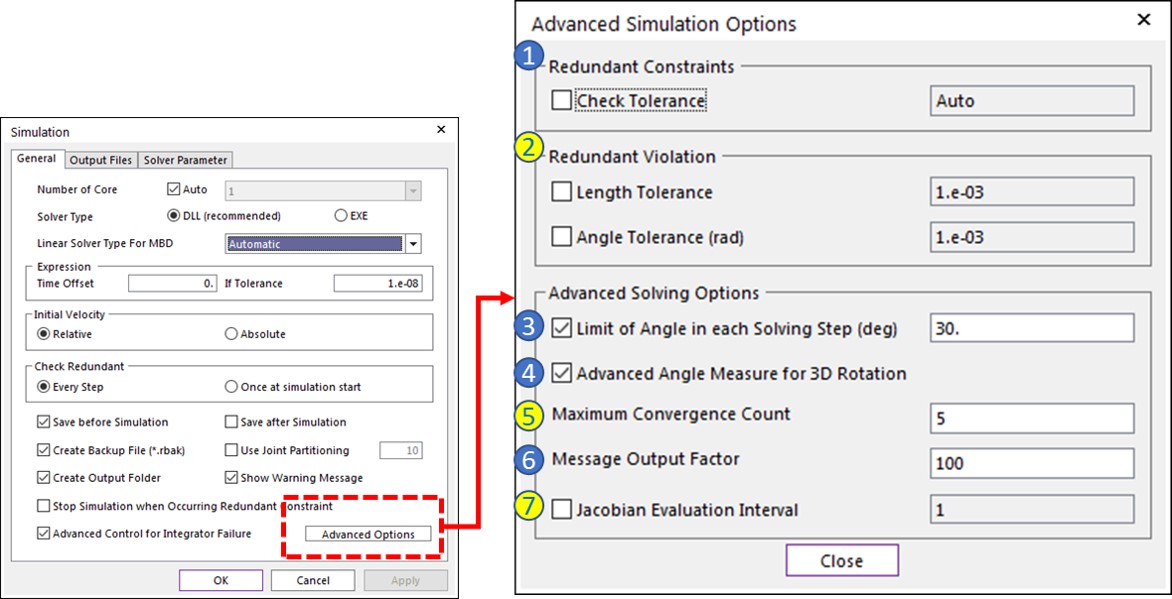
1. Check Tolerance
-
在大多数情况下,您无需考虑。
-
当求解器在内部判断冗余约束时,该选项被用作数值公差。
- 如果更改此项,求解器可以判断不同的约束作为冗余约束。(以多余约束约束所处理的DOF可能被识别为非多余约束。)
2. Redundant violation
- 建议选中此选项,一般来讲使用默认值并无大碍。
-
RecurDyn自动判别多余约束,对没有过约束的模型进行自动仿真。但是,有时会因用户的失误而导致模型过约束而得到不正确的结果。
-
例如,转动连接副会被当做残值约束处理, action marker与base marker可以分别展开。但是,使用者如果定义了转动连接副,求解器会认为使用者不希望两marker分开。
-
如果使用Redundant violation的话,用多余处理的值DOF值会被处理为高于实际自由度而产生旋转,求解器会将旋转视作报错而停止运行。
-
用文字表达理解起来会有一些难度,请观看下面的示例视频:
-
特意在4个连杆上加载了两运动,左方上端的旋转副被看着多余约束处理,两个实体相互分离。但是读者很难意识到这点。
-
如果选中redundant violation选项,如果对多余约束处理的约束条件,加载平移或旋转方向值,就可以被当错误处理,求解器停止仿真。
-
这使您可以轻松找到意想不到的错误。
- 如果是一个很费时间的仿真模型,那么就会节省相应的时间!
-
特意在4个连杆上加载了两运动,左方上端的旋转副被看着多余约束处理,两个实体相互分离。但是读者很难意识到这点。
- 如果选中redundant violation选项,如果对多余约束处理的约束条件,加载平移或旋转方向值,就可以被当错误处理,求解器停止仿真。
- 这使您可以轻松找到意想不到的错误。
- 如果是一个很费时间的仿真模型,那么就会节省相应的时间!
3. Limit of Angle in each Solving Step (deg)
- 如果此值被设为软件默认值(ON)的话,可以直接使用。
- 但是,在V8R5及之前的版里保存的模型为OFF,建议勾选后使用。
- 在需要快速仿真旋转模型的时候是一个很有用的选项。
- 在快速旋转时,计算结果可能不准确,该选项限制了一个步长中的旋转角度,从而减小了步长以提高精度。
- 在一个步长里出现比指定角度更大的旋转的情况,这个选项,可以通过抑制步长之间的步长来减少每步的旋转量,从而实现更精确的分析。
4. Advanced Angle Measure for 3D Rotation
- 此值的缺省值为“ON”状态,可以直接使用其缺省值。
- 但是,在V8R5及之前的版里保存的模型为OFF,建议勾选后使用。
- 从RecurDyn V9R1开始对Bushing force及matrix force的旋转算法进行了改善,如果是ON的话,会使用改善的算法。
- 如果您使用Bushing force,如果不勾选此项,只能计算对于X、Y轴来说小于90的情况,如果使用此选项,X、Y、Z的旋转都可以计算。(相关文章)
- 通过这一点,想要去除多余约束,或者想要得到在多个连接副上产生的分散反力的时候,使用bushing force会变得更为自由。
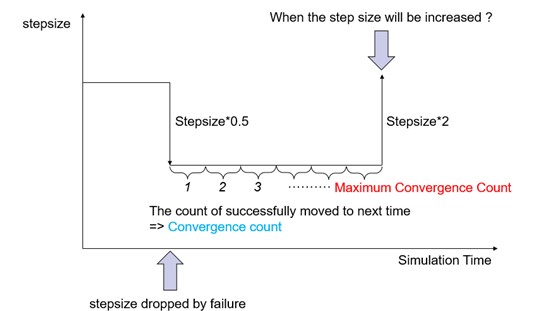
5. Maximum Convergence Count
- 如果收敛稳定话,则会增加步长的大小,以加快解算速度。
-
此选项将意味着以增加步长的情况下收敛的次数。即,如果这个值是5、则5次收敛后增加步长。
-
如果此值为1的话则表示1次收敛后就会增加步长,所以仿真时间会加快。仿真会因此变得不稳定,所以建议您小心使用。
- 比如说,对DOE等迭代计算的时候,充分地设置为稳定的模型后,然后一点点减少这个值,然后对比仿真结果,如果在较短的模拟时间内得到足够好的结果,则意味着可以使用较小的收敛上限计数。
6. Message Output Factor
- 仿真时,TIME, STEPSIZE ,A_DELNRM等信息会显示在信息窗口。
- 这一项表示信息写出的频率,大多数情况下,此选项使用默认值。
- 只是偶尔如果步长太小的话,可能会出现太多的值带来不便,这时候,使用1000以上的值会提高可读性。(仿真结果不会受到任何影响。)
7. Jacobian Evaluation Interval
- 如果使用此选项,则可以控制计算Jacobian的频率。
-
模型动作变化不大的情况,可以通过调节这个频率以到达速度改善的效果。(使用比1大的值)
- 仿真时,在信息窗口出现的NJAC是雅可比评价的累计次数
- 在下面实例中,100->199表示这段区间内进行99次计算,这个变化量与 Message Output Factor(默认100)比较没有太大差异的话,意味着在仿真中,Jacobian不会发生很大的变化。这时,增加雅可比评价区间的话仿真时间会加快(但,对正确度会带来影响,建议在对已被验证的模型上的仿真速度改善上使用。)
- 例如,要进行DOE等迭代计算的时候,充分地设置为稳定的模型后,然后一点点增大这个值(并确认NapC),如果仿真结果没有很大的变化,仿真时间大量缩短的话,意味着可以使用大的interval进行仿真。

