
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
由于RecurDyn是多体动力学软件,所以动力学分析也是很常见的。
此时,虽然除了对话的End Time, Step Size之外,还有各种参数,但是其中关键的还是上限时间步长。 (求解器入门教程第一章)
另外请参考General选项的参数。 ( 求解器入门教程第二章 )
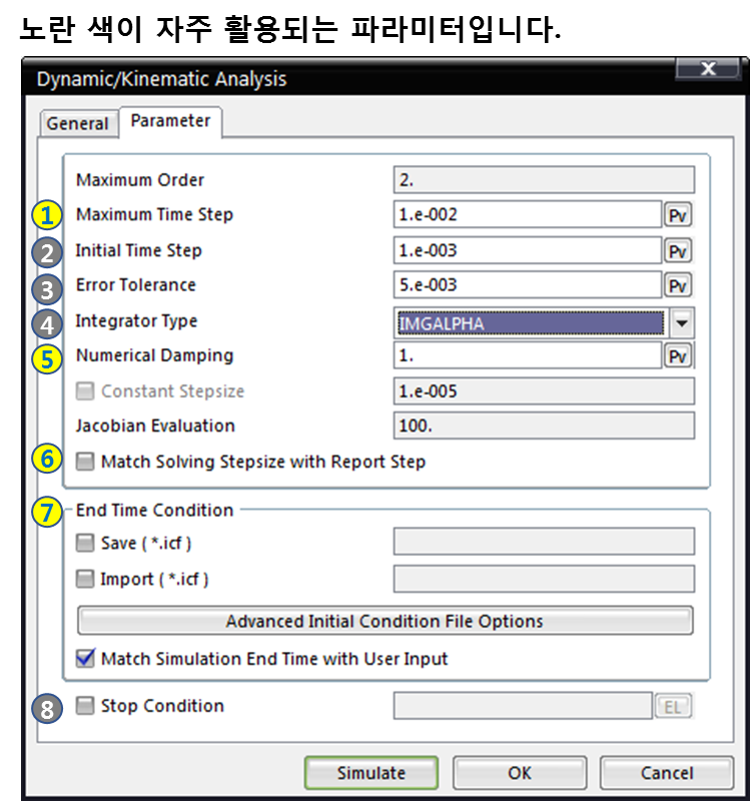
第三章中我们来了解Parameter选项中的各种参数。

1. Maximum Time Step
- 求解器可以使用的Maximum Step大小。
- 由于RecurDyn是可变Step,所以在分析过程中Step的大小会持续变化。
- 如果想要观察的现象发生在大约1秒的周期,可以通过将max. step size设置比其小的方式确认所需的现象。
- 该值越小,对应需要的分析时间就越长。
- ( 求解器入门教程第一章 )
2. Initial Time Step
-
不需要特别关注。在大多数情况下,默认值就足够了。
3. 容差
- 可将其视为分析过程中允许的误差值。
- 该值越小,执行的分析越严格,大多数情况下,可以直接使用默认值。
4. 积分器类型
- RecurDyn基本上提供了IMGALPHA和DDASSL两个积分器,并为Track工具箱和Fflex提供了TRKGALPHA和HYBRID积分器。
-
在大多数情况下使用IMGALPHA积分器。但请记住以下特征。
- IMGALPHA : 它具有可靠的解决诸如接触之类的非线性问题的优点。但是在振动问题中,可能会因为Numerical Damping导致非预期的阻尼效果。
- DDASSL : 有几乎没有数值阻尼效果的优点。但是对于非线性问题,建议使用IMGALPHA。
5. 数值阻尼
-
由于求解器的性质,即使系统内没有单独的阻尼元素,也可能会发生一些阻尼。(弹簧阻尼系统,摆锤问题等) 这种数值阻尼会影响系统中的所有物体。
-
Step越大,数值阻尼影响越大。特别是当在time step期间物体速度变化较大时,数值阻尼的影响也会很大。在这种情况下,可以通过减少数值阻尼或将maximum Time Step设置为小于发生的振动周期的1/100来减少阻尼效果。
-
数值阻尼越小,阻尼影响越小,但是在诸如接触的非线性问题中,可能会出现分析失败或分析时间变长的现象。
- 由于实际现象的建模中会存在各种无法考虑的阻尼元素,因此在大多数情况下可以使用默认值。
- 해석을 위한 최소의 numerical damping 값을 찾는 방법은 아쉽게도 존재하지 않습니다. 이는 모델 및 다양한 설정에 따라 달라질 수 있습니다.
6. Match Solving Stepsize with Report Step
-
虽然动画的step大小由endtime/steps统一确定,但实际求解器的step大小和Plot (rplt文件)的step大小是可变的。 因此,会出现无法获得所需时间的绘图数据的情况。(例如,即使需要t=1.5s的结果,求解器也可能无法精确计算5s瞬间的值。(没有分析1.5s,在分析完1.47s的下一步分析1.51s)
-
通过检查这个选项,求解器计算N*endtime/step的时间瞬态,并匹配动画步骤和情节步骤。
7. 结束时间条件
-
使用它可以保存End Time的条件,并将其导入以用作其他仿真的初始状态。
- 参考相关FAQ。
8. 停止条件
- 如果指定表达式的值为TRUE(非零值),模拟将停止。
- 当满足特定条件时,可以通过停止仿真来减少计算时间。
- 例如,如果两个物体之间的距离小于1mm,则可以停止分析。
9. 其他
-
Jacobian Evaluation : 仅在TRKGALPHA中使用 – 决定多久计算一次Jacobian。
-
Constant Step Size : 使用恒定step大小– 仅在TRKGALPHA中使用
관련 글

{kind=link}