{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
当RecurDyn确定Marker的姿势时,
指定Coordinate类型后,如果使用无穷大值设置Slave Point,则只需控制Master即可确定姿势。当希望通过Parametric Point调整Marker的姿势时,此技巧特别有用。
如果难以理解,只需记住以下内容就可以了。
“如果将Slave设置为包含无穷大值(非常大的值)的向量,则只能用Master来决定姿势。”
- 如果Slave设置为非无穷大值,那么当更改Master时,最终的姿态也会受到Slave值的影响。
- 当slave设置为无穷大值时,slave的方向总是固定的,因此可以认为它总是指向同一个方向的向量。(只产生可忽视的差别)
例如,在下面输入Slave Point为0,0,1.e 15。(因为不能输入无穷大,所以输入非常大的值)这样输入,实际上,无论基于什么点,Slave Point都将被固定为与Z轴平行的向量。 (当然不是完全平行的,但误差是可以忽略的)

现在让我说明一下原因。对于Coordinate类型,了解姿态确定的方式可以了解原因。如果在Coordinate类型中选择“master”作为“Z”作为“Slave”作为“X”,
拿Master和Slave来决定姿势如下。
首先,我们把Master对Origin的方向确定为Z轴,
- 通过计算Master和Slave对Origin的外积来确定Y轴
- 通过计算Z轴和Y轴的外积来确定X轴。(因为Master和Slave可能不是正交的,所以重新计算X)
也就是说,不仅master会影响slave确定轴方向。 如果Origin发生变化,则必须将master和slave都更改为origin。
但是,如果将slave设置为无穷大值,事实上,不管origin,slave始终可以称为同一方向向量。(误差很小)也就是说,Slave总是指向同一个方向,因此您只需用master就可以控制姿势。
附件模型是一个示例,利用上述原理,在保持一定Slave的情况下,只需将Origin和Master一起更改即可保持一定的姿态。(只有Marker的模型)
模型描述
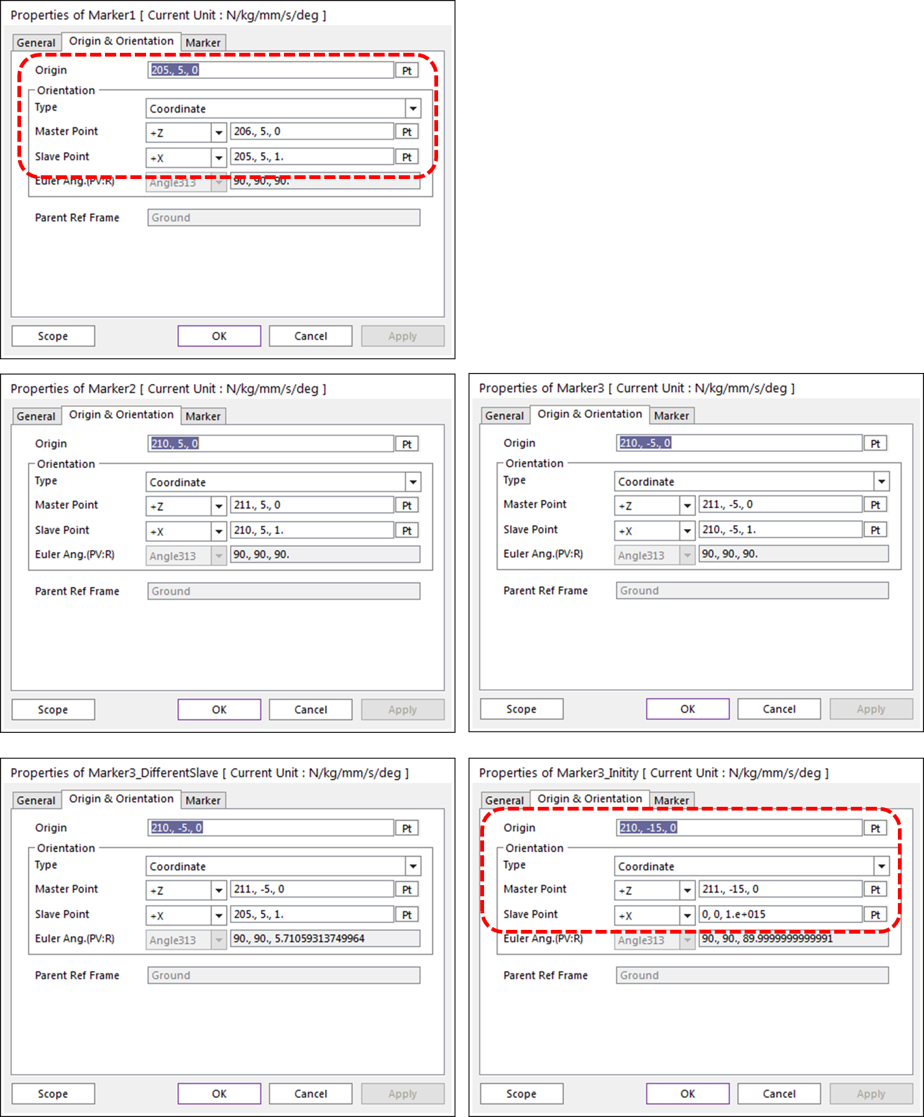
- Marker1为Origin设置了Master为Global X,slave为Global Z方向
- Origin 205, 5, 0
- Master 206,5,0(即方向向量为1,0,0)
- Slave 205,5,1(即方向向量为0,0,1)
- Marker2,Marker3可以根据origin的变化适当地将master,slave一起改变,保持一定的姿势。
- Marker3_DifferentSlave因未对Marker3中的Slave进行适当的更改而稍有改变(Euler Angle不是90,90,90)
- Origin 210, -5, 0
- Master 211,-5,0(即方向向量为1,0,0)
- Slave 205,5,1(即方向向量是-5,10,1)
- 但对于Marker3_Infinity,请输入Slave为0,0,1.e 15,以保持与Marker1,Marker2,Marker3相同的姿势。(Slave总是在Global Z方向)
- 对于Marker3_Infinity,如果只有origin和Master一起更改相对值,则继续保持相同的姿态(Slave为0,0,1 e+15)。